
LLM-Assisted Multi-Agent Control for Roll-to-Roll Manufacturing
Overview
Roll-to-roll (R2R) manufacturing—used for flexible electronics, batteries, and sensors—requires precise tension and velocity control. Traditionally, commissioning these lines is a time-intensive manual process, especially when material properties change or hardware degrades.
We developed a Lifecycle Multi-Agent Framework that automates the entire control engineering pipeline: from system identification to controller synthesis, and finally to safe sim-to-real adaptation.
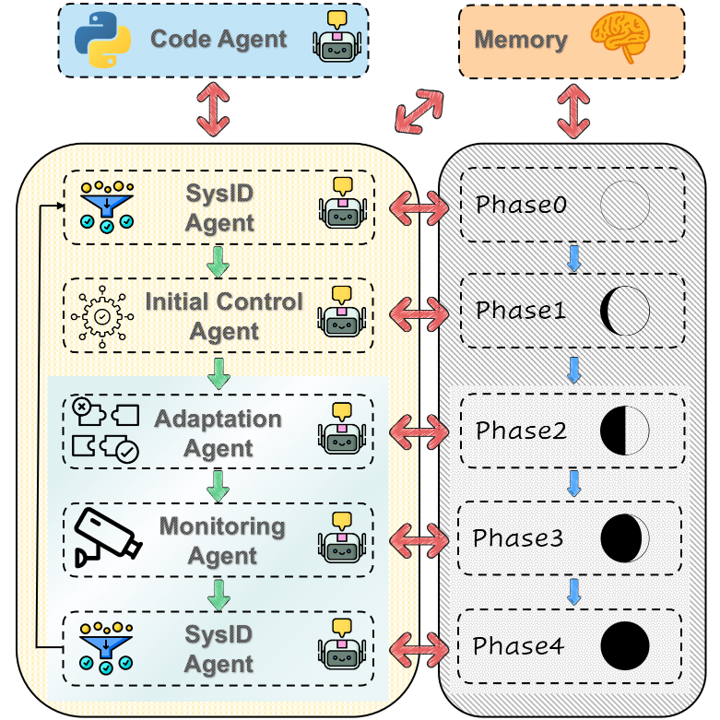 Overview of the LLM-assisted R2R control framework: closed-loop architecture spanning System ID, Design, Adaptation, and Monitoring phases.
Overview of the LLM-assisted R2R control framework: closed-loop architecture spanning System ID, Design, Adaptation, and Monitoring phases.
Motivation
R2R manufacturing systems face several challenges:
- Manual controller tuning is time-intensive and requires domain expertise
- Material property changes and hardware degradation require frequent re-commissioning
- Safety constraints must be maintained during any adaptation process
- Model uncertainty (up to 50% parameter mismatch) is common in practice
This framework addresses these challenges through automated, safety-aware control synthesis.
The 5-Phase Lifecycle Architecture
Unlike static code generation, this framework manages the entire lifecycle of the manufacturing system through five distinct phases:
| Phase | Agent | Function |
|---|---|---|
| System ID | SysID Agent | Uses operational data and physics-informed regression to construct high-fidelity simulation model |
| Initial Design | Initial Control Agent | Compares PID, MPC, and LQR architectures in simulation to select best baseline controller |
| Adaptation | Adaptation Agent | Performs rapid sim-to-real adaptation, tuning controller on physical system |
| Monitoring | Monitoring Agent | Watches for degradation, distinguishes control issues from physical issues |
| Model Update | Update Agent | Refines simulation model based on operational data |
RAG-Enhanced Domain Knowledge Retrieval
A critical component of the framework is the Retrieval-Augmented Generation (RAG) system that grounds LLM reasoning in domain-specific knowledge. Rather than relying solely on the LLM’s pretrained knowledge, the agents retrieve relevant information from a curated knowledge base of R2R control principles, material properties, and tuning heuristics.
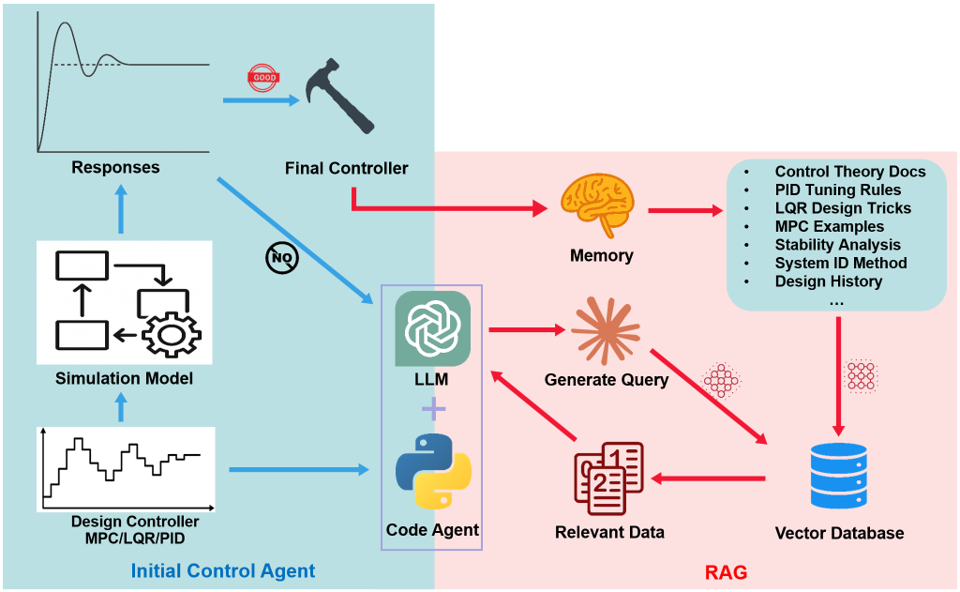 RAG-enhanced agent architecture: domain knowledge retrieval augments LLM reasoning for control-specific decisions.
RAG-enhanced agent architecture: domain knowledge retrieval augments LLM reasoning for control-specific decisions.
The RAG system enables:
- Context-aware tuning: Agents retrieve relevant tuning strategies based on current system state
- Physics-grounded reasoning: Material properties and dynamics constraints inform parameter suggestions
- Historical pattern matching: Past adaptation successes guide current decisions
Key Innovation: Simulation Safety Filter
In manufacturing, you cannot simply let an AI “try” random parameters on hardware. We introduced a rigorous Simulation Safety Filter in the Sim-to-Real phase.
Before any LLM-suggested parameter is deployed to real motor drivers, it must pass validation in the simulation model:
- Predicted performance must improve over current baseline
- Tension must remain within safety bounds: T_min ≤ T(t) ≤ T_max
If the adjustment violates safety constraints or fails to improve performance in simulation, it is rejected before it touches the physical machine.
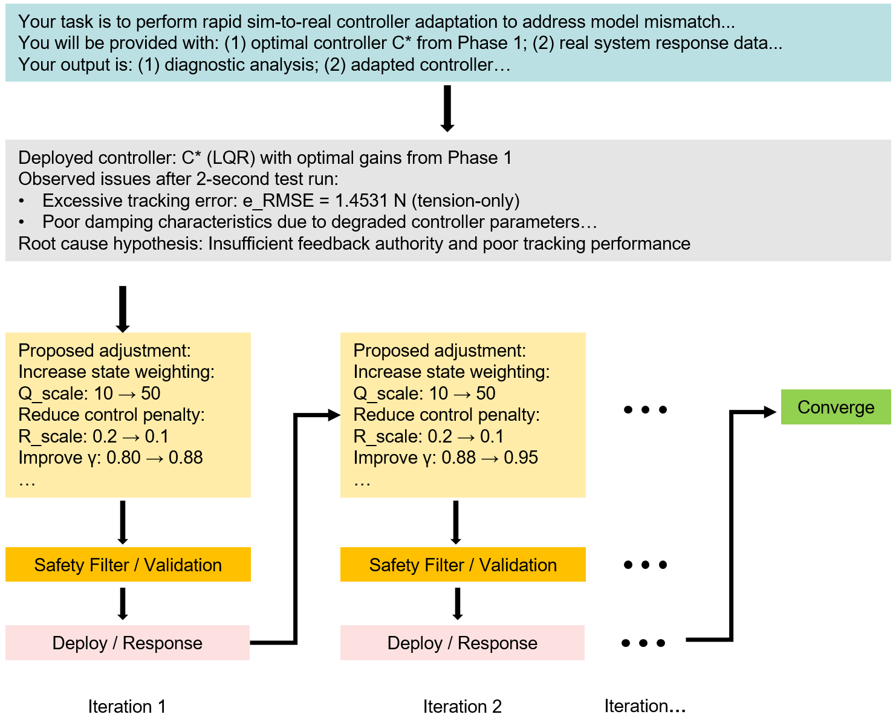 The Adaptation Agent loop with Safety Filter acting as gatekeeper between LLM suggestions and real hardware.
The Adaptation Agent loop with Safety Filter acting as gatekeeper between LLM suggestions and real hardware.
Results
Validated on a multi-span web handling model with 6 rollers under significant model uncertainty (up to 50% parameter mismatch).
Velocity Ramp-Up Scenario
The system handled a 10-fold acceleration (0.01 → 0.10 m/s). The initial controller (trained on imperfect model) oscillated dangerously.
- Adapt1: Agent increased feedforward compensation
- Adapt2: Agent refined feedback gains to eliminate steady-state error
- Result: Tension deviations reduced from >4N to within ±1.5N
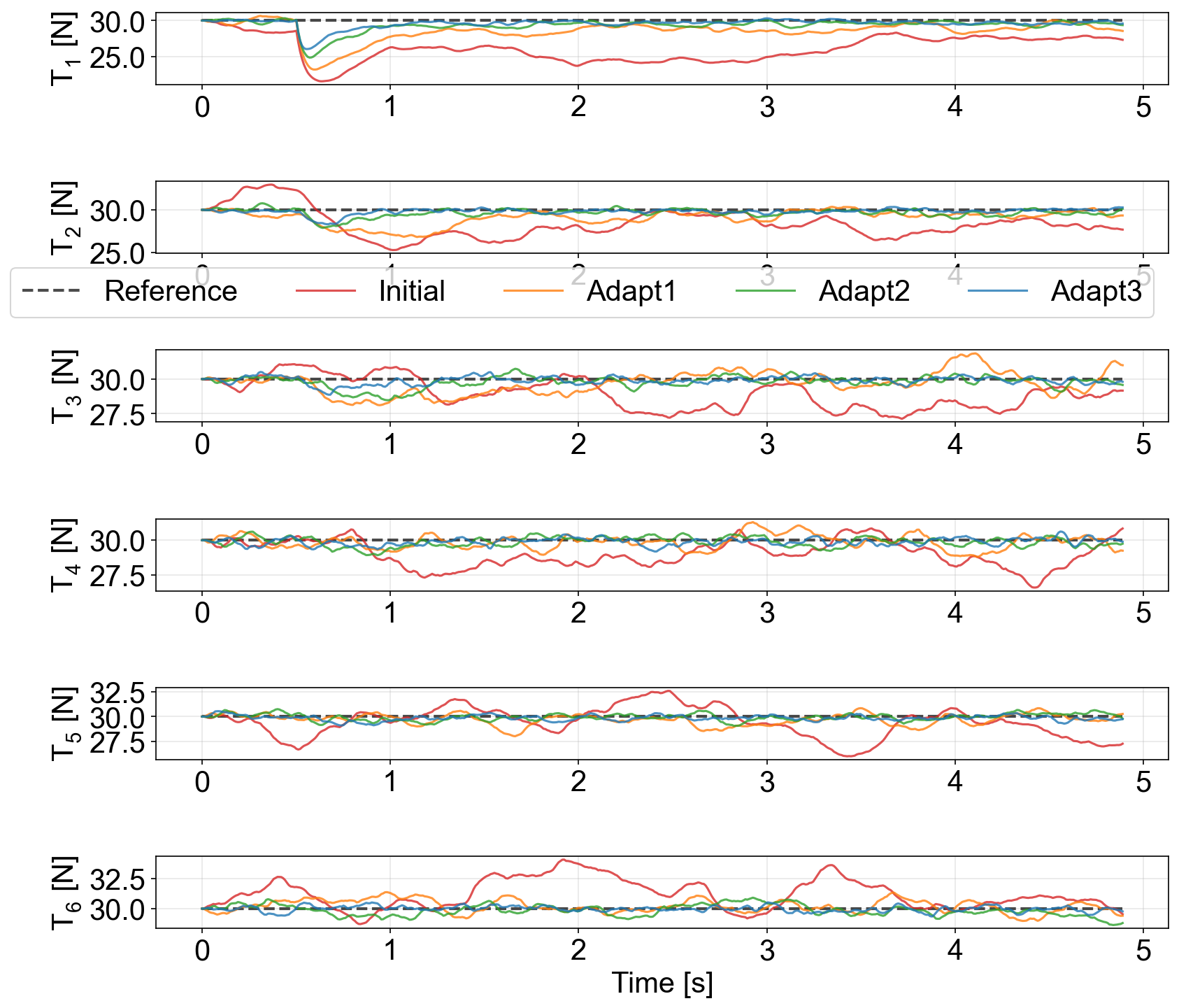 Comparison of tension regulation during velocity ramping: Adapt2 (green) shows significantly tighter control than oscillating Initial controller (red).
Comparison of tension regulation during velocity ramping: Adapt2 (green) shows significantly tighter control than oscillating Initial controller (red).
Dual-Layer Diagnostics
The Monitoring Agent doesn’t just look at error rates—it diagnoses physics through dual-layer analysis:
- Layer 1 (Control Metrics): Is the error exceeding the baseline threshold (2σ)?
- Layer 2 (Root Cause Analysis): LLM analyzes sensor patterns to classify faults
In experiments simulating bearing wear (friction increasing), the agent correctly identified “Bearing Friction Degradation” with 72% confidence and distinguished it from sensor noise.
Tools & Implementation
- Simulation: Physics-informed R2R model with 6-roller configuration
- Control Architectures: PID, MPC, LQR comparison
- Safety Validation: Pre-deployment simulation checking
- LLM Interface: Multi-agent coordination for lifecycle management
Publication
Li, J., Li, S., Martin, C., Li, W., & Chen, D. (2026). An LLM-Assisted Multi-Agent Control Framework for Roll-to-Roll Manufacturing Systems. Manufacturing Letters (NAMRC 54), Under Review.
@article{li2026r2r,
title={An LLM-Assisted Multi-Agent Control Framework for Roll-to-Roll Manufacturing Systems},
author={Li, Jiachen and Li, Shihao and Martin, Christopher and Li, Wei and Chen, Dongmei},
journal={Manufacturing Letters},
volume={00},
year={2026}
}
Related Projects
- S2C: LLM Multi-Agent Control Synthesis — Certified H∞ controller synthesis with LLMs
- Curriculum-Based SAC for R2R — Deep reinforcement learning for tension control
- Adhesion Dynamics Modeling — Physics-based modeling for R2R lamination