
DM-MPPI: Datamodel for Efficient and Safe Model Path Integral Control
Overview
Model Predictive Path Integral (MPPI) control is a powerful algorithm for controlling robots in complex environments because it handles non-linear dynamics and constraints easily. However, it is computationally expensive: it requires simulating thousands of random trajectories (samples) at every timestep to find the best path.
We introduced DM-MPPI, a framework that makes MPPI up to 5× more efficient. By applying the “Datamodels” concept from machine learning to control theory, we trained a lightweight predictor to identify which trajectories actually matter. This allows the controller to instantly discard (prune) “useless” samples before wasting computation on them.
 The pipeline showing how the Datamodel acts as a gatekeeper, filtering samples based on predicted influence before the heavy MPPI computation occurs.
The pipeline showing how the Datamodel acts as a gatekeeper, filtering samples based on predicted influence before the heavy MPPI computation occurs.
Motivation
In standard MPPI, thousands of noisy trajectories are averaged to calculate the control input. Most of these trajectories have near-zero weight (influence) on the final decision, yet we waste resources simulating them.
The key insight: not all samples are created equal. If we can predict which samples will matter, we can skip the rest entirely.
The Core Logic: Learning Influence
DM-MPPI introduces an Influence Predictor with three steps:
| Step | Action | Description |
|---|---|---|
| Feature Extraction | Extract cost features | Distance to goal, distance to obstacles for each sample |
| Influence Prediction | Apply trained model | Lightweight linear model predicts influence score |
| Pruning | Discard low-influence | Samples below threshold are removed before MPPI computation |
The influence predictor is trained offline using datamodel regression, then deployed for O(1) prediction at runtime.
Safety via Influence-Aware Tuning
Beyond efficiency, we utilize the Datamodel for Safety. In traditional MPPI, tuning the penalty weight λ for obstacles is difficult:
- Too Low: The robot crashes
- Too High: The robot freezes or moves too conservatively
DM-MPPI monitors the Total Influence of Violation Samples. If trajectories that hit obstacles have too much influence on the final decision, the system detects this in real-time and dynamically increases the penalty parameter λ. This “reflexive” safety mechanism prevents crashes that static tuning misses.
Results
Evaluated on a path tracking task with obstacle avoidance using a kinematic bicycle model.
Sample Efficiency: 5× Reduction
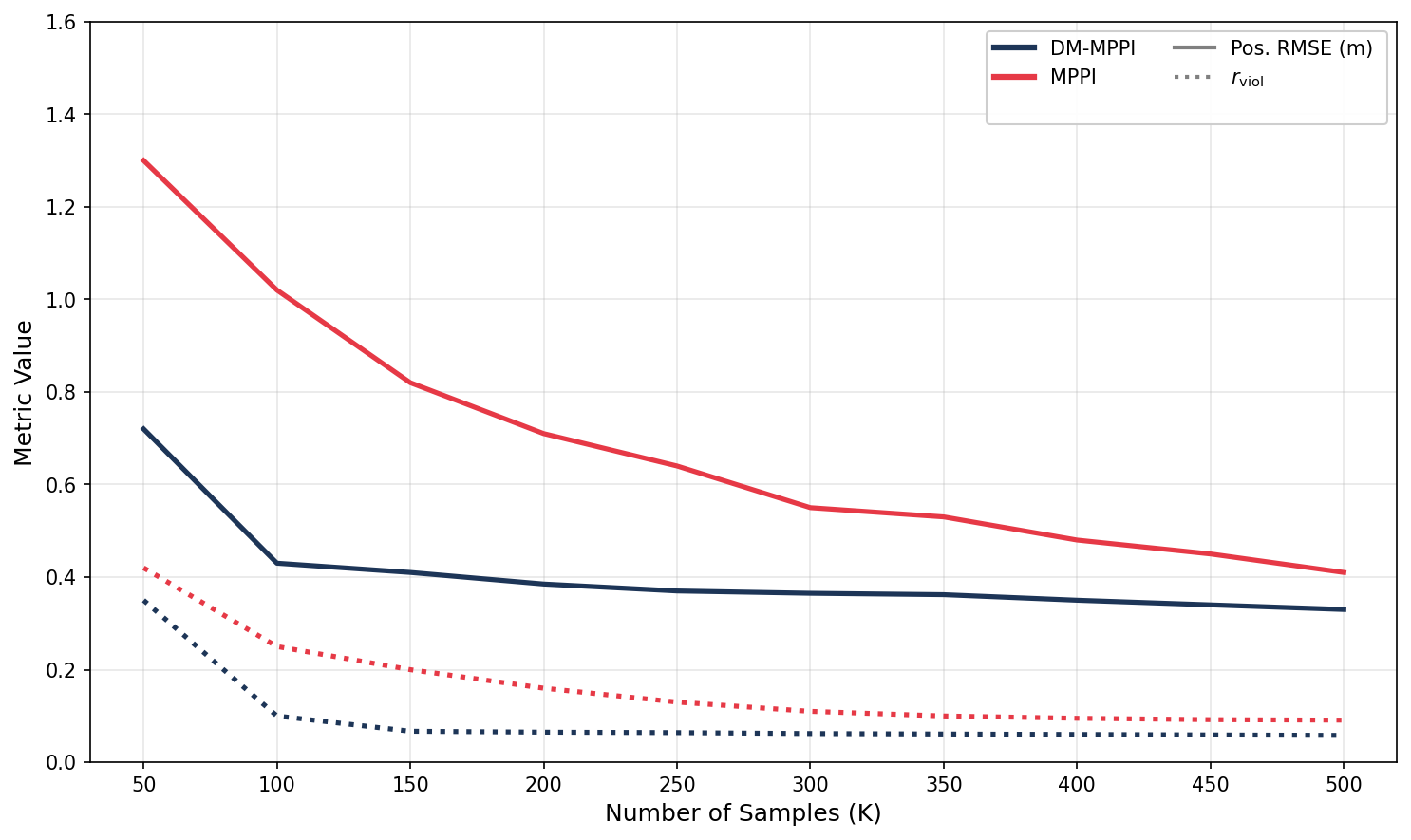 Sample efficiency comparison: DM-MPPI maintains stable performance at K=100, matching standard MPPI at K=500.
Sample efficiency comparison: DM-MPPI maintains stable performance at K=100, matching standard MPPI at K=500.
Using the Influence Predictor to prune samples maintained trajectory quality with significantly fewer resources:
| Configuration | Samples | Position RMSE | Min. Obstacle Dist. | Iteration Time |
|---|---|---|---|---|
| Standard MPPI | 500 | 0.41 m | 1.24 m | 85.4 ms |
| DM-MPPI (Fixed ρ) | 100 | 0.44 m | 1.31 m | 18.2 ms |
| DM-MPPI (Adaptive ρ) | 100 | 0.43 m | 1.42 m | 18.5 ms |
Trajectory Quality Comparison
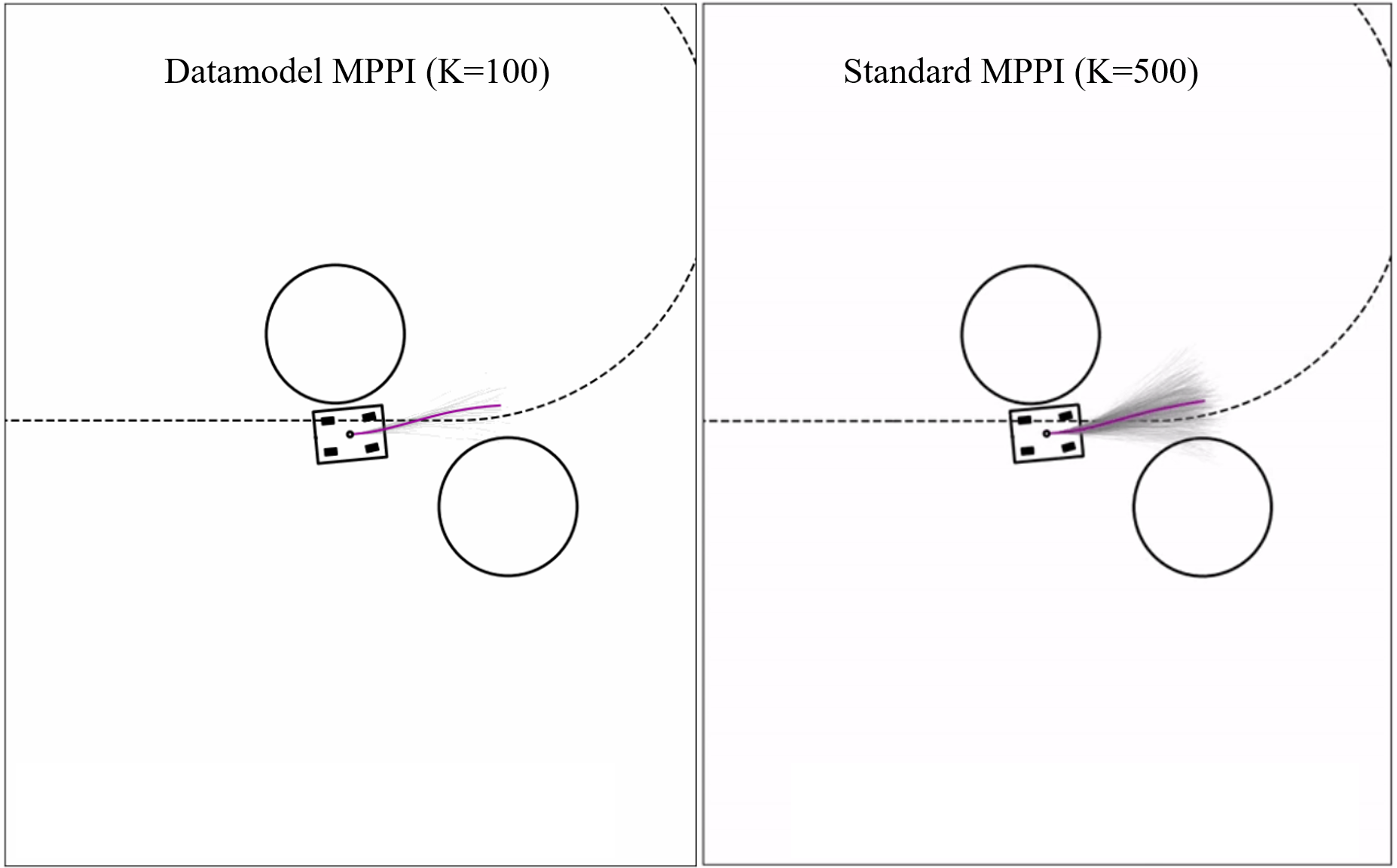 Despite using only 100 samples, DM-MPPI produces control output comparable to standard MPPI with 500 samples.
Despite using only 100 samples, DM-MPPI produces control output comparable to standard MPPI with 500 samples.
The adaptive variant achieves the largest minimum obstacle distance by dynamically adjusting ρ based on the violation influence ratio.
Technical Approach
We define the “influence” of a sample trajectory on the optimal control input as the derivative of the solution with respect to the sample’s weight. We approximate this using a linear Datamodel:
- Offline: Train regression model mapping trajectory costs to influence scores
- Online: Predict sample importance in O(1) time
- Pruning: Discard samples with predicted influence below threshold
This achieves the efficiency of reduced sampling with the safety of influence-aware constraint handling.
Tools & Implementation
- Control Framework: Model Predictive Path Integral (MPPI)
- Influence Prediction: Linear datamodel regression
- Application: Robot navigation with obstacle avoidance
- Performance: 5× sample reduction, improved safety margins
Publication
Li, J., Li, S., Duan, X., & Chen, D. (2025). DM-MPPI: Datamodel for Efficient and Safe Model Path Integral Control. arXiv preprint arXiv:2512.00759.
![]()
@article{li2025dmmppi,
title={DM-MPPI: Datamodel for Efficient and Safe Model Path Integral Control},
author={Li, Jiachen and Li, Shihao and Duan, Xu and Chen, Dongmei},
journal={arXiv preprint arXiv:2512.00759},
year={2025}
}
Related Projects
- Influence Functions for System ID & LQR — Data attribution for linear system identification
- Datamodel-Based Data Selection for DeePC — Context-dependent data selection for predictive control